publications
2022
-
 MonoPLFlowNet: Permutohedral Lattice FlowNet for Real-Scale 3D Scene Flow Estimation with Monocular ImagesRunfa Li, and Truong NguyenIn Proceedings of the European Conference on Computer Vision (ECCV) 2022
MonoPLFlowNet: Permutohedral Lattice FlowNet for Real-Scale 3D Scene Flow Estimation with Monocular ImagesRunfa Li, and Truong NguyenIn Proceedings of the European Conference on Computer Vision (ECCV) 2022Real-scale scene flow estimation has become increasingly important for 3D computer vision. Some works successfully estimate real-scale 3D scene flow with LiDAR. However, these ubiquitous and expensive sensors are still unlikely to be equipped widely for real application. Other works use monocular images to estimate scene flow, but their scene flow estimations are normalized with scale ambiguity, where additional depth or point cloud ground truth are required to recover the real scale. Even though they perform well in 2D, these works do not provide accurate and reliable 3D estimates. We present a deep learning architecture on permutohedral lattice - MonoPLFlowNet. Different from all previous works, our MonoPLFlowNet is the first work where only two consecutive monocular images are used as input, while both depth and 3D scene flow are estimated in real scale. Our real-scale scene flow estimation outperforms all state-of-the-art monocular-image based works recovered to real scale by ground truth, and is comparable to LiDAR approaches. As a by-product, our real-scale depth estimation is also comparable to other state-of-the-art works.
@inproceedings{MonoPLFlowNet, author = {Li, Runfa and Nguyen, Truong}, title = {MonoPLFlowNet: Permutohedral Lattice FlowNet for Real-Scale 3D Scene Flow Estimation with Monocular Images}, booktitle = {Proceedings of the European Conference on Computer Vision (ECCV)}, year = {2022}, publisher = {Springer Nature Switzerland}, address = {Cham}, pages = {322--339}, doi = {10.1007/978-3-031-19812-0_19} }
2021
-
 SM3D: Simultaneous Monocular Mapping and 3D DetectionRunfa Li, and Truong NguyenIn IEEE International Conference on Image Processing (ICIP) 2021
SM3D: Simultaneous Monocular Mapping and 3D DetectionRunfa Li, and Truong NguyenIn IEEE International Conference on Image Processing (ICIP) 2021Mapping and 3D detection are two major issues in vision-based robotics, and self-driving. While previous works only focus on each task separately, we present an innovative and efficient multi-task deep learning framework (SM3D) for Simultaneous Mapping and 3D Detection by bridging the gap with robust depth estimation and “Pseudo-Lidar” point cloud for the first time. The Mapping module takes consecutive monocular frames to generate depth and pose estimation. In 3D Detection module, the depth estimation is projected into 3D space to generate “Pseudo-Lidar” point cloud, where Lidar-based 3D detector can be leveraged on point cloud for vehicular 3D detection and localization. By end-to-end training of both modules, the proposed mapping and 3D detection method outperforms the state-of-the-art baseline by 10.0% and 13.2% in accuracy, respectively. While achieving better accuracy, our monocular multi-task SM3D is more than 2 times faster than the state of the art pure stereo 3D detector, and 18.3% faster than using two modules separately.
@inproceedings{SM3D, author = {Li, Runfa and Nguyen, Truong}, booktitle = {IEEE International Conference on Image Processing (ICIP)}, title = {SM3D: Simultaneous Monocular Mapping and 3D Detection}, year = {2021}, pages = {3652-3656}, doi = {10.1109/ICIP42928.2021.9506302}, }
2019
-
 Advances in Molecularly Imprinting Technology for Bioanalytical ApplicationsRunfa Li, Yonghai Feng, Guoqing Pan, and 1 more authorSCI Sensors 2019
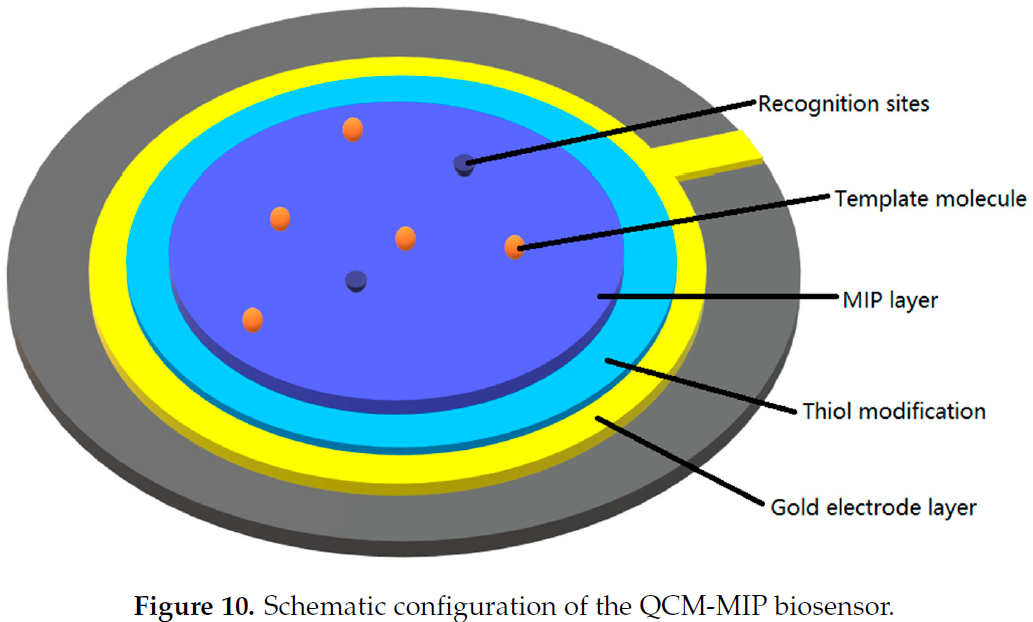
Advances in Molecularly Imprinting Technology for Bioanalytical ApplicationsRunfa Li, Yonghai Feng, Guoqing Pan, and 1 more authorSCI Sensors 2019In recent years, along with the rapid development of relevant biological fields, there has been a tremendous motivation to combine molecular imprinting technology (MIT) with biosensing. In this situation, bioprobes and biosensors based on molecularly imprinted polymers (MIPs) have emerged as a reliable candidate for a comprehensive range of applications, from biomolecule detection to drug tracking. Unlike their precursors such as classic immunosensors based on antibody binding and natural receptor elements, MIPs create complementary cavities with stronger binding affinity, while their intrinsic artificial polymers facilitate their use in harsh environments. The major objective of this work is to review recent MIP bioprobes and biosensors, especially those used for biomolecules and drugs. In this review, MIP bioprobes and biosensors are categorized by sensing method, including optical sensing, electrochemical sensing, gravimetric sensing and magnetic sensing, respectively. The working mechanism(s) of each sensing method are thoroughly discussed. Moreover, this work aims to present the cutting-edge structures and modifiers offering higher properties and performances, and clearly point out recent efforts dedicated to introduce multi-sensing and multi-functional MIP bioprobes and biosensors applicable to interdisciplinary fields.
@article{Biosensors_MIP, author = {Li, Runfa and Feng, Yonghai and Pan, Guoqing and Liu, Lei}, title = {Advances in Molecularly Imprinting Technology for Bioanalytical Applications}, journal = {SCI Sensors}, volume = {19}, year = {2019}, number = {1}, article-number = {177}, issn = {1424-8220}, doi = {10.3390/s19010177}, }