Runfa Blark Li 李润发
Ph.D. Candidate, UC San Diego
Robotics · Embodiment Learning · Dexterous Manipulation · Exoskeleton · Computer Vision & Graphics
Former Qualcomm XR & Computer Vision Research Scientist
Chief Percussionist in UCSD Symphony Orchestra
I am a Ph.D. candidate in Electrical and Computer Engineering (ECE) and affiliated with Contextual Robotics Institute at UC San Diego. I am advised by Prof. Nikolay Atanasov in the UCSD Existential Robotics Lab, and Prof. Truong Nguyen in the UCSD Video Processing Lab.
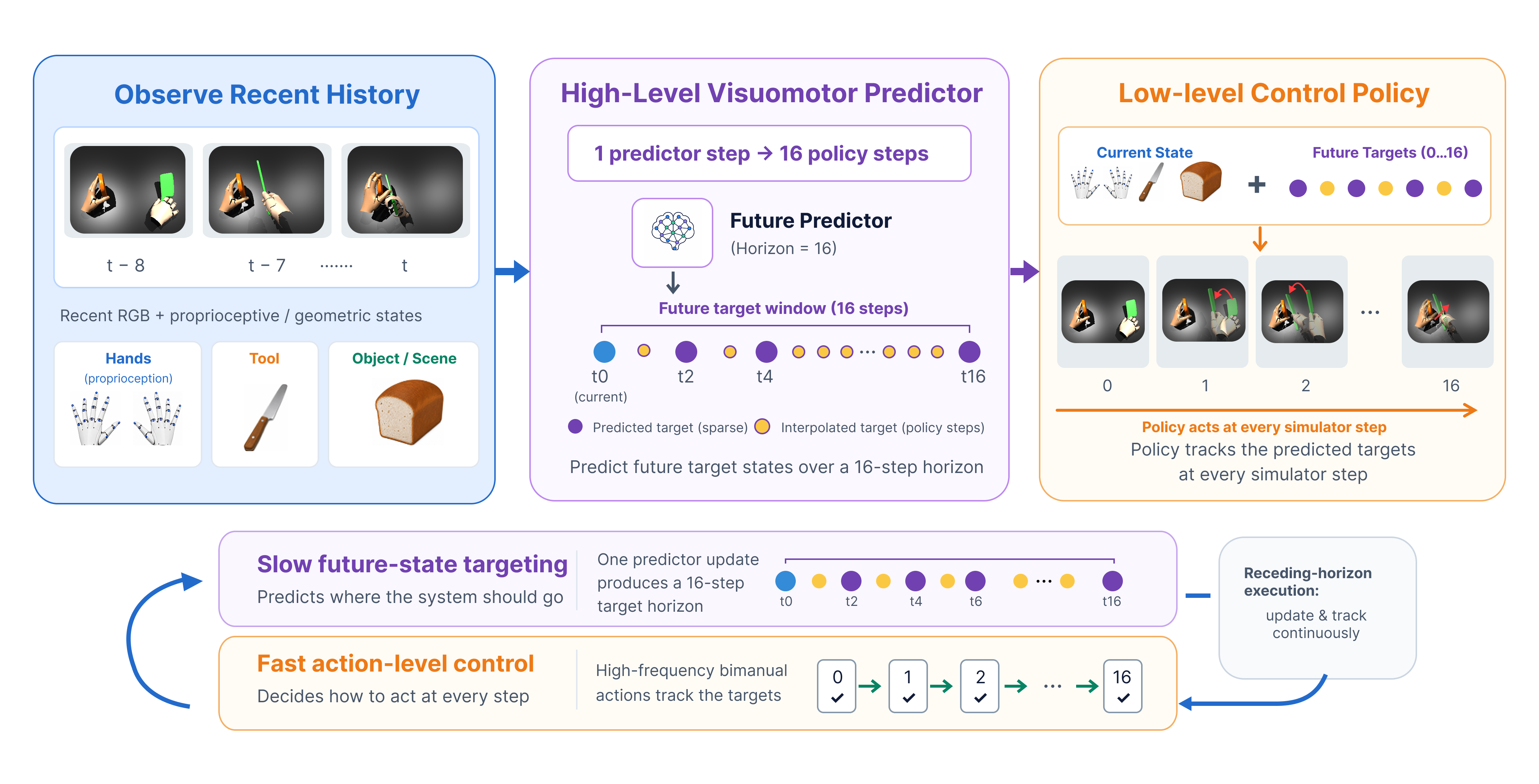
My current research focuses on robotics and embodied intelligence, especially dexterous manipulation, bimanual tool use, visuomotor policy learning, world models/VLAs, humanoid modeling, and learning-based exoskeletons. I am particularly interested in building robotic and human-assistive systems that can acquire complex physical skills, reason about future physical interactions, and act with human-like dexterity.
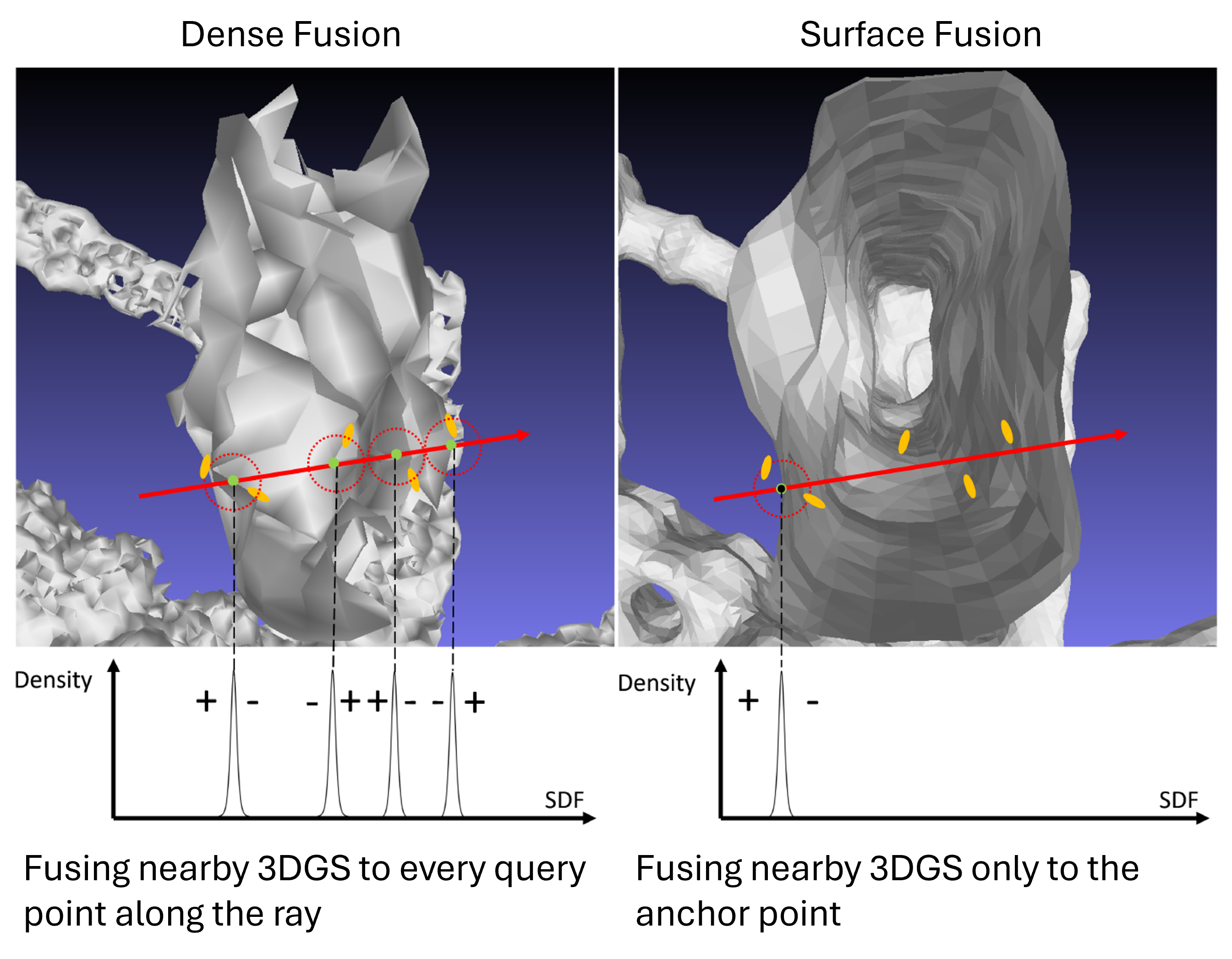
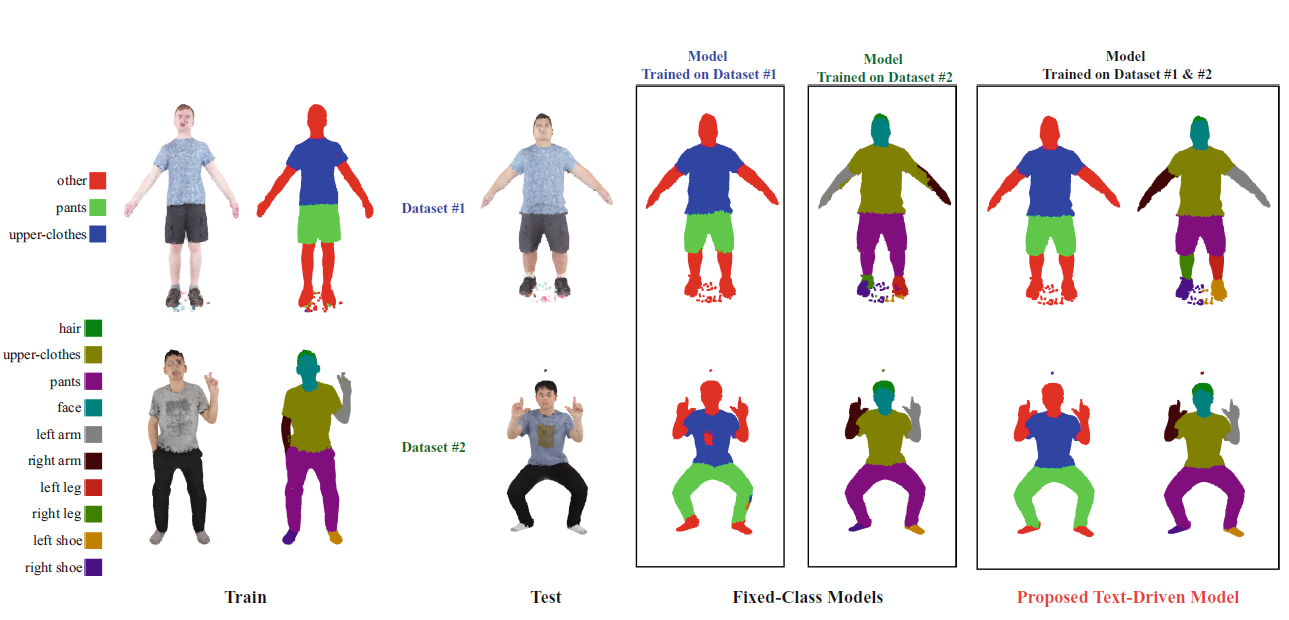
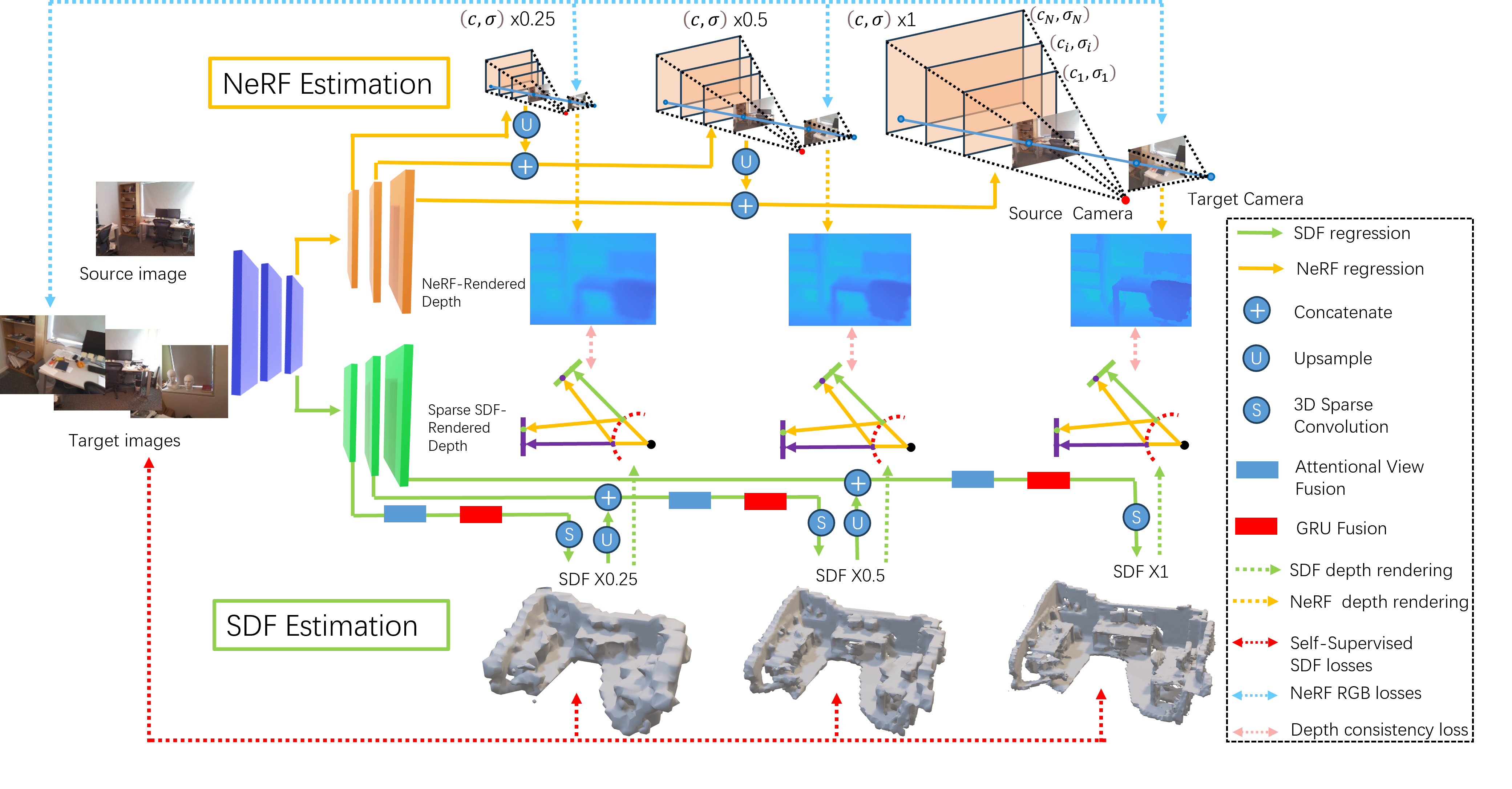
Previously, my work centered on 3D/4D computer vision, including dynamic SLAM, 3D Gaussian Splatting, neural scene reconstruction/generation, 3D scene flow, and human reconstruction. I have also worked with the Qualcomm XR/CV team on real-time visual SLAM and graphics systems for Snapdragon-based devices.
Outside of research, I am the chief percussionist in UCSD Symphony Orchestra, I am also a drummer and a singer. I have trained in percussion since childhood and have performed with many orchestras and bands in both China and the United States. Music remains an important part of my life and also motivates my long-term interest in robots and wearable systems that can assist, teach, and augment complex human skills.
news
| Jun 6, 2026 | We are organizing a workshop on Bimanual Dexterous Tool-Use for CoRL 2026 in Austin! Feel free to reach out to me if you’re interested to co-organize or be a keynote speaker! |
|---|---|
| Jun 1, 2026 | My Professor Nikolay Atanasov and my postdoc labmate Brian Lee will help present our SplatSDF in ICRA 2026 in Vienna, Austria, I can’t be there unfortunately due to my visa, feel free to reach out to me and have fun in Vienna! |
| May 30, 2026 | UCSD Symphony Orchestra Spring Concert is coming!! See you at Mandeville Auditorium on 6/2 8pm |
| Mar 6, 2026 | Excited to be in Tucson, Arizon for WACV 2026 to present our DynaGSLAM!! Let me know if you want to talk! |
| Dec 2, 2025 | In NeurIPS, welcome to SD and let me know if you want to talk! |